|
1万円以下で作ろう!!<重量級?ドブソニアン用赤道儀台>の巻き!! 2002/12/22
フリーストップ手動導入対応型KIKUTA式赤道儀
 
 スーパーシンプル ポンセットマウント スーパーシンプル ポンセットマウント
 マニアは苦行が大好きです? マニアは苦行が大好きです?
埼玉の変わり者「手作り光器」から、オリジナルの傾き式赤道儀「ヘリクロス」が発表になった。
体重80キログラムという製作者を乗せても何とかなるという「エレベータークイズ」の様な赤道儀だ。
しかも日曜大工OKで、お金が無くてもOK。今回は、そのヘリクロスをHPから緊急レポートだ。
 これが本体。 これが本体。
※ヘリクロスの由来:調子に乗って長時間の追尾をすると終いには縁が交差してしまう欠点があり
ヘリがクロス=ヘリクロスでけっして「ヘ○クレス」のパロではありません。(-。-;)y-゜゜゜
火星の大接近も近くなり、いろいろわくわくしながら時を過ごしている方も多いでしょう!
今宵、高性能大口径ドブソニアン望遠鏡が増えてきています。シーイングさへ許せば分解能を生かして惑星の詳細部まで見えます。しかし、所詮ドブです。やせ我慢して500倍でも追尾が出来ると自慢してみても悲しいと思いませんか?
そこで考えました。「30分でも簡単に追尾が出来れば惑星の詳細まで気持ち良く見えるはず」「一歩進んだドブソニアンでアマチュア最大口径の高倍率惑星観察をしてみましょう!」。というわけで簡単に作れないものかと思案しました。
めんどくさい人はここで購入してください。(私は英文の解読より自作のほうが簡単なものなので・・・)
http://pw1.netcom.com/~tlsystem/index.html
構造:
まず、トップの写真をご覧下さい。
銀色の蝶番が4つ見えます。この蝶番の軸が極軸を向くようにセットします。元々仰角が35.5°(使用場所の緯度に合わせる)あります。ここ埼玉の緯度に合わせてあります。あとはおおよそに磁石で北へ向けます。つまり北極星に合わせるわけです。
手前にある自動車のジャッキの先にある棒を左に回すとジャッキが下がり始めます。すると、重心が支点より力点のジャッキ側にあり支えるものは蝶番とジャッキだけですので上の板が下がり始めます。しかし、支点となる蝶番が35.5°の角度があるためジャッキの支える部分が真下へは下がらず写真の場合斜め左に下がりだします。
台全てが35.5度の軸に沿って回転運動をします。ジャッキ自体は真っ直ぐ下へ下がりますが接触部分は横に滑りますがボールが付いていますので障害にはなりません。
台の上にドブを置けば、鏡先がどちらを向いていても、極軸の円周軌道上にあるので、天体が導入されていればジャッキを自転速度に合わせて下げる事により追尾をする事になります。
台の上に置いたドブにより天体を導入する。そして、赤道台のシャフトを回すと追尾が出来るといった簡単な物です。
ただし、台は30分で7.5°傾斜しますのでほどほどで又最初からスタートする必要があります。
7.5°ぐらいの傾斜は観望上不都合の無い程度です。
また、仮に多少軸がずれていても追尾中にドブだから簡単に修正が出来ます。
メリット
・ドブの構造上の「高倍率観測中に鏡筒を動かす事による振動」から開放される。
・高倍率の追尾が楽。
・構造が簡単なので自作できる。
経緯:
以前から考えていたのですが、問題は追尾装置が時計時を刻むエレベータを作らなければなりません。
アバウトに行くなら、とりあえず軽自動車用のパンタグラフタイプのジャッキで手動にすればいとも簡単です。
という事で、冬休みの空いた時間を使い早速製作です。
本当は、モーターで自動追尾をさせたいところですが大変そうなので今回は見送り、ドブにふさわしく手動で簡単な物になりました。
また、この構造で行くと、手動・モーター以外に下りオンリーなので、オイルダンパー式やオルゴールなどに見る風圧抵抗を使い無動力でもいけそうです。
構想にあたっては掲示板でいろいろアドバイスいただきました。ありがとう御座いました。
基本構造図を書きました。
フレームは合板でOKでしょう。
追尾は30分は取りたいと思います。
構造図:
図が下手ですみません。ヘ(^^ヘ))))... ...((((ノ^^)ノ でも貴方ならお解かりですよね!!m(-_-)m
追尾ユニットの大きさがどれ位になるか書いてみました。仰角は緯度を考えおおよそで35°にしています。
合板で作ると剛性は低くなるので大きめに考えて、32センチのドブを載せるとすると、高さが30cmぐらいでしょうか。
車のジャッキを入れるとちょうど良さそうですね。(^_^)
単純にサイズダウンして、ニンジャ32センチや銀次など中型ドブは高さ25センチぐらいで作れるでしょう。
テーブルはドブの大に合わせて小さくても構いません。
接眼部の低さをカバーできるので皆様も挑戦してくださいね。
設計図:
この図はかなりいい加減です。
12月31日に材料の切り出しが終りました。円形のテーブルは21mm合板、傾斜部は30mm合板で切り出しました。テーブルの曲線はルーターを使い簡単でしたが、直線は丸鋸が故障してしまい手引で切り出しになってしまい少々苦労しました。
こだわりが無ければ、テーブルは四角でも三角でも構いませんが、四角で簡単に済ませるのが一番良いと思います。
ジャッキは自動車解体屋でピカピカの物(ジャッキは使用頻度が少なく廃車時にゴミとなる)を500円で購入しました。
2002/1/5
とりあえず組んでみました。
エレベーターに悩んで時間を浪費しましたがドブとの組み合わせなので簡単にいく方法でまずはテストです。
ジャッキの上にはボール型キャスターが付いています。この地点で30分の追尾をした場合52mm傾きます。
強度的には全く問題が無く私が乗ってエレベーションさせても問題無しです。
今回は剛性を出す為ボンドはエポキシを使い+ビスで圧着させました。
250倍で10分程テストしてみました。
さすがに踏み台が無いと使い物になりません。
追尾は非常に楽です。「ドブとは思えません!」大成功のようです!!
おそらく500倍でもなんら問題はなさそうで自宅からの惑星に期待が持てます。
手動追尾でもジャッキのハンドルは軽く滑らかです。
<仕上げの際に完成させる部分>
・塗装
・エレベータの固定。ボール型キャスターの受けに鉄板を。
・フレキシブルシャフト。長めの物を用意して先に直シャフトをつけハンドルを付ける。
・テーブルの開き止め。ナイロンバンドで最大値に固定。
・調整足、水平儀、方位磁石の取り付け。
以上の作業で完成とします。
エレベーターのモーター化はまだ良いアイディアが出ません。
良い知恵がありましたら是非メールを下さい。お願いします!!
近日、モーター取り付け予定あり。
 このハンドル(パイプ)を使い自由な角度で操作。 このハンドル(パイプ)を使い自由な角度で操作。

ジャッキのシャフトにエポキシパテを使いドライバービットを埋め込みフレキシブルシャフトを取り付けます。
センターが安定し非常にスムースな操作感です。
後に、フレキシブルシャフトを2本から1本にした所、よりスムースに扱えるようになった。
「ヘリクロス」と「ヘタレッス」で悩んだ・・・。 (゜o゜)\(-_-)オイ
1月8日
シュワルツ120ツイン用にも簡単に使えそうです。
軽量な鏡筒なら、すごく簡単、材料も残材の12mmコンパネを使えば千円もかからず赤道儀が作れる。
自作派としては、なんか真剣になってきました・・・。
横山さん→シュミカセツインに如何ですか?ちょうど良いテーブルになりますよ!!
発展構想:
 赤道台 赤道台
1月18日
先日ジャッキの駆動にSP用のモーターを取り付けてみました。
全高を最大にして28センチのジャッキを下げていく状態での実験です。
基本的に直結なので16倍速での使用になります。
最初の5分ほどは遅れています。そして数分は何とか追尾できます。その後早くなります。
早い分には広角アイピースなので対象の天体を端に入れて停止し視界から消える前に又モーターを動かしin側に移します。
この繰り返しで意外と使えます。
戻す時は遅いので手動か電動ドライバーで戻します。
手動だと多少振動が出ますがモーターを使うと振動は無いので手動よりモーターですね!
しかし、パンタグラフの変速に同期させるのは至難の業です。そうなるとやはりポンセットマウントになってしまいます。
「ヘリクロス」開発にあたり、かけこみ寺として協力していただいた「天体望遠鏡自作掲示板」及び「ドブマガジン掲示板」の皆様そしてメールにてアドバイスいただいた皆様本当にありがとう御座いました。
文殊の知恵で完成を見た「ヘリクロス」ドブで惑星観望を楽しむ方が増える事を祈ります。
簡単に惑星を大口径高倍率で見るなら「ヘリクロス」という事で、終了!(後は、仕上げが終ったら写真を入れ替えます)
ポンセットマウント
そうこう考えているうちに「ポンセットマウント」という物が理解できるようになりました。メデタシメデタシ!
メリットがとても多いです。
・「ヘリクロス」との違いで、一定回転のドライブによる追尾が出来るので市販の極軸モーターが使えそう。
・マウントの高さを抑えられる。
・工作が簡単そう。
アマチュアが取る組む事は難しいだろうか?
答え:木材の円加工と角度の切り出しが出来れば至って簡単な物のようです。
幸いにして私はルーターによってそれが可能です。
従って、ポンセットも作ってみようと思います。
円加工が出来ず簡単に作りたく、手動追尾が良くて、高さがあってもかまわないなら、「ヘリクロス」。
気合を入れるなら、写真も撮りたいのなら「ポンセット」ですかね。
参考までに仕組みを簡単に書いて見ました。
2006/11/3
先日、サミットで素晴らしいポンセットマウントを拝見!
衝撃的なので、研究用に掲載致します。
|
2006/11/22
第9回双眼鏡望遠鏡サミット
四国 酒井さん 自作
55cmドブソニアン
+超コンパクトポンセットマウント |
 |
ポンセットマウント全景
バッテリーボックスから電源供給されています。 |
 |
北極星側から |
 |
ステッピングモーター
モーターの脇にある軸が架台を動かします。
|
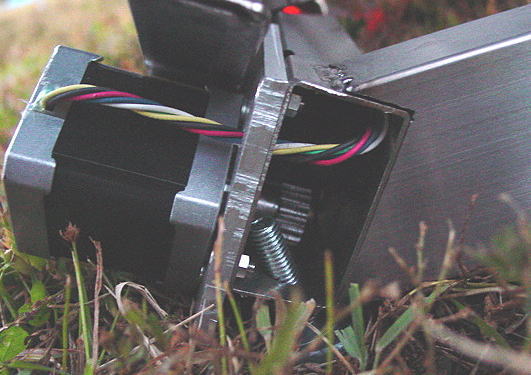 |
モーターの回転を、角パイプ内のギヤで減速しています。 |
 |
南側は、軸受けのみです。 |
掲示板抜粋
理由はソフトウェアを除いた部分を出来るだけ安く単純にしたかった、ということです。設計の都合とか工作の誤差などによる変更はソフトウェアの変更で対応することにすれば、工作は楽になります。
ただし、55cmはかなりの質量があるのでモーターで巻き戻したく60から100倍速くらいの早さはほしいので、上記理由もあり、駆動回路とソフトウェアを自作しています。
MD-5のような既製品を使わないで自作したかを書き忘れていますが、PICを使ってみたかったこと、駆動周波数を自由に決めるために波形合成にしたかったこと、PICの入手性が良くて選択の余地も多いのに安価なので駆動回路が安上がりになることでしょうか。波形合成を使っていますので、恒星時でも太陽時でも月時駆動でもソフトウェアしだいで自由に変更できます。
サミットでの使用も試行段階だったのですが、オリエンタルのモーターって感心するくらい入力に忠実に応答することがわかったのです。実はPIC16F630のコンパレータと基準電圧発生器を使い倒して51[pps]相当のバージョンもあったのですが、望遠鏡の方向によっては200倍超で見たときに恒星像が楕円になるという形でそれはみごとに振動しまして。それで、同じシリーズでピン互換でADつきのPIC16F676に変えたのでした。今は10bit
ADを8bit精度で使ってますが、それで充分なような感じです。
負荷変動によるズレは、簡単にいえば、機械系のインピーダンスと加える力で決まります。インピーダンスを決定する要素のひとつとしてステッピングモーターがあるのは事実ですが、それが目立つほど他の構成要素の機械的インピーダンスが低いかと言うとそうでもないはずなので、問題ないと思います。鏡筒や架台の剛性とのバランスですね。フィードバックをどれくらいの範囲で効かすか、これも選択肢はいっぱいありますが、コイル電流だけというのが私の選択です。
|
このようにコンパクトな完成には、剛性のあるステンレス角パイプを使用したのが一番のポイントだと思います。
工作精度に対して、プログラムで反応させ、眼視では十分な精度に完成させています。
ステッピングモーターや、マイコンのプログラム等、KIKUTAはまるでダメな世界ですのでこの辺の質問は掲示板で酒井さんを呼び出してみて下さい。(汗)
|
で、そうこう言いながらも、結局、良い市販品を手に入れ楽しんでいます
ポンセット・ドブ望遠鏡
天体双眼望遠鏡トップへ戻る
|